
The final phase of the automotive case study focused on building and validating a ROS2-based demonstrator that implements safe and explainable pedestrian emergency braking.
Our architecture integrates AI perception modules (YOLOS-Tiny pedestrian detector, lane detector, and a Variational Autoencoder for anomaly scoring) with rule-based decision logic, braking and supervision nodes. The system was deployed on NVIDIA Orin AGX hardware, with GPU workloads dedicated to deep learning inference and anomaly detection, while CPU cores handled decision and safety checks.
")
Automotive Use Case Architecture
")
Automotive Use Case Topics
Functional Safety & SOTIF
We implemented and tested compliance against UN Regulation No. 152 and selected SOTIF test cases (ISO/PAS 21448), focusing on AI perception limitations. The demonstrator validates correct system reactions such as time-to-warning and time-to-collision braking requirements.
Real-Time GUI
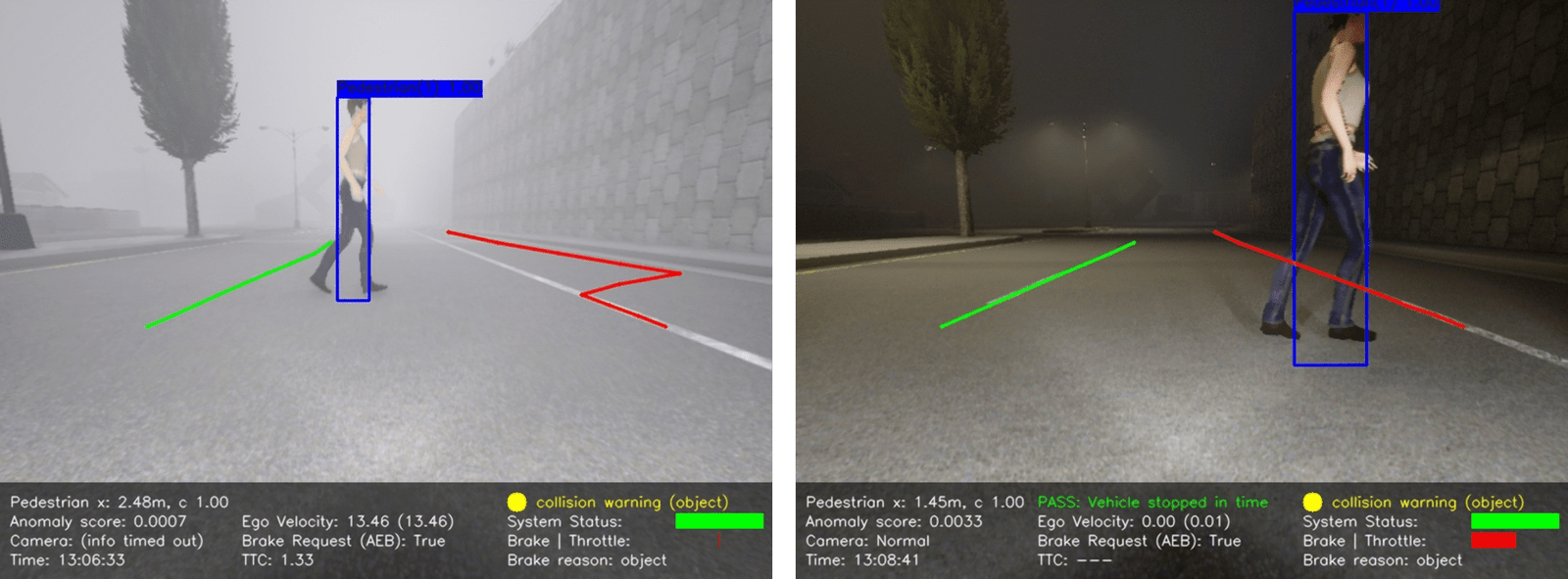
A central achievement is the graphical user interface overlay, which provides transparency and explainability of system behaviour. In real time, it visualizes:
- Detected pedestrians, lanes, and bounding boxes
- Ego-vehicle velocity and braking actions
- System warnings and reasons for intervention
- Confidence and anomaly scores
- Scenario pass/fail results
This GUI proved to be an essential tool for both debugging and demonstrating safety compliance.
")
GUI Pedestrian Detection
")
GUI Anomaly Warning
Scenario Testing
The core evaluation was based on DS-3.1 scenarios (adult/child pedestrians, dry/wet, day/night, 10–50 km/h). We executed more than 150 test runs, with automated pass/fail analysis and human review.
")
Pass/fail Results Example
")
Results
To further challenge robustness, we designed extended scenarios beyond the official matrix:
- Fog and low visibility
- Unseen traffic sign (anomaly detection)
- Pedestrian crossing behind an occluding car
- Slow/hidden pedestrians
Fog day/night

Pedestrian behind a car
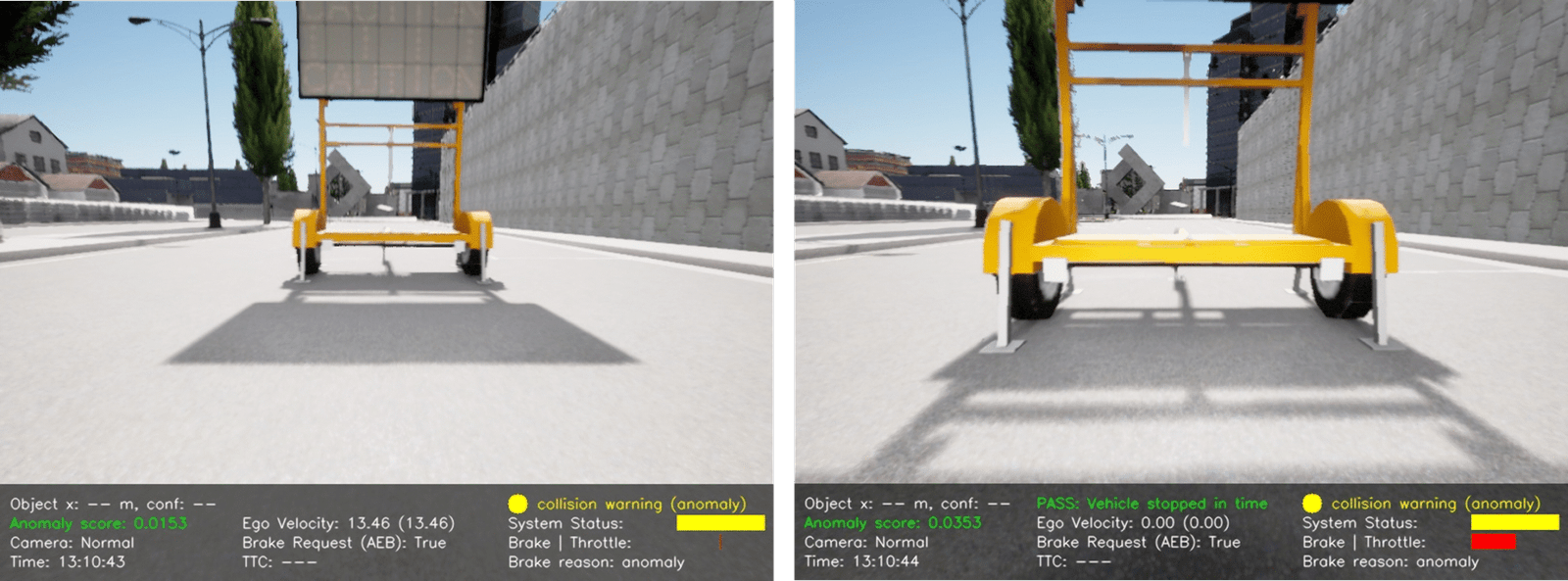
Anomaly Caution Sign
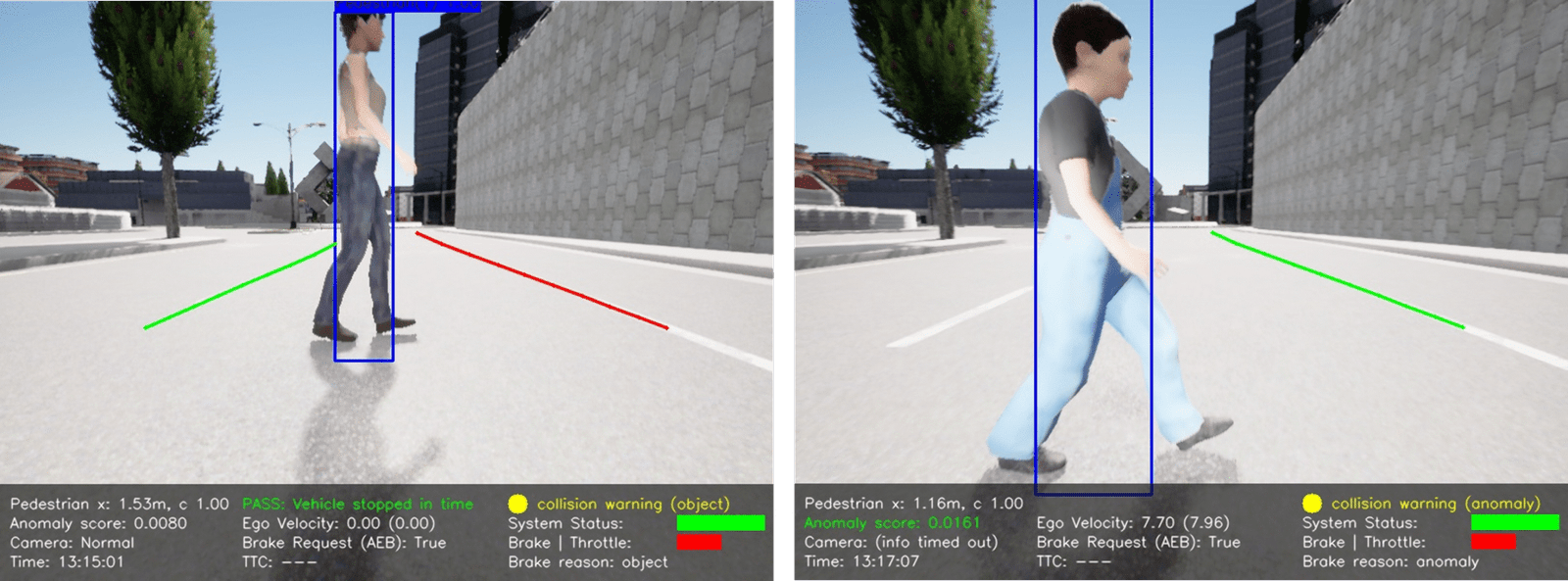
Slow Pedestrians-adult/child
Demonstration & Results
During the live demonstration at the Trustworthy AI in Safety Critical Systems event (September 2025), live system behaviour was showcased under various conditions.
Key findings included:
- Robust performance at 10–30 km/h in day and dry conditions
- More challenging results at 50 km/h and under night/wet conditions, where sensor reliability and VAE sensitivity limited margins
- Clear improvement potential via sensor fusion (e.g. radar/LiDAR) and dataset augmentation
Automotive Demo Videos
Demonstration videos and replays of scenarios are available here:
Explanation of figures:
- Row 1 (left) SAFEXPLAIN AEB Demo, Adult Detection in Daylight, Dry Conditions: AI perception detects a pedestrian and triggers warning and automatic braking, proving safe and explainable AEB performance under standard test conditions. Row 1 (right) SAFEXPLAIN Final AEB Demo, Foxglove Dashboard Adult: Adult detection in daylight, dry conditions at 10 km/h, showing the results of the SAFEXPLAIN AEB demonstrator.
Created by NAVINFO Europe, SAFEXPLAIN. - Row 2 (left) SAFEXPLAIN Automotive Demonstrator, Final AEB Demo, Child Detection in Day, Dry Conditions: Child detection in daylight and dry-road conditions, demonstrating the SAFEXPLAIN AEB system’s reliable perception and safe braking performance. Row 2(right) SAFEXPLAIN Final AEB Demo, Foxglove Dashboard Traffic Sign Detection: Traffic sign detection and unseen object handling demonstrated in the SAFEXPLAIN AEB system, visualized through the Foxglove Dashboard.
- Row 3 (left) SAFEXPLAIN Final AEB Demo, Adult Detection in Rain Conditions: Adult detection in rainy conditions, showing the SAFEXPLAIN AEB system’s reliable perception and safe braking performance. Row 3 (right) SAFEXPLAIN Final AEB Demo, Foxglove Dashboard Adult Detection in Rain Conditions: Adult detection in rainy conditions, visualized through the Foxglove Dashboard, showing the SAFEXPLAIN AEB system’s reliable and safe performance.