

News
Second IAB Meeting Confirms SAFEXPLAIN Advancements at Start of Year 3
The SAFEXPLAIN project met with members of its industrial advisory board on 03 October 2024 to present project advancements at the beginning of the project’s third and final year. This meeting was important for ensuring the project’s research outcomes align with real-world industry needs.

RISE explains XAI for systems with Functional Safety Requirements
The SAFEXPLAIN project is analysing how DL can be made dependable, i.e., functionally assured in critical systems like cars, trains and satellites. Together with other consortium members, RISE has been working on establishing principles for ensuring that DL components, together with required explainable AI supports, comply with the guidelines set forth by AI-FSM and the safety pattern(s).
High interest in SAFEXPLAIN tech @ Gate4SPICE INTACS event
The SAFEXPLAIN keynote at the INTACS event “Optimal Performance of Modern Development: Automotive SPICE® Fusion with Intelligent Systems and Agile Frameworks” hosted by SEITech Solutions GmbH as part of the Gate4SPICE was extremely well-received by attendees. The...

SAFEXPLAIN deliverables now available!
Twelve deliverables reporting on the work undertaken by the project have been published in the results section of the website. The SAFEXPLAIN deliverables provide key details about the project and how it is progressing. The following deliverables have been created for...

SAFEXPLAIN takes part in 1st intacs® certified ML for Automotive SPICE® (pilot) training
SAFEXPLAIN partner, exida development provided invaluable contributions to the two days of pilot training for the intacs® certified machine learning (ML) automotive SPICE® training.
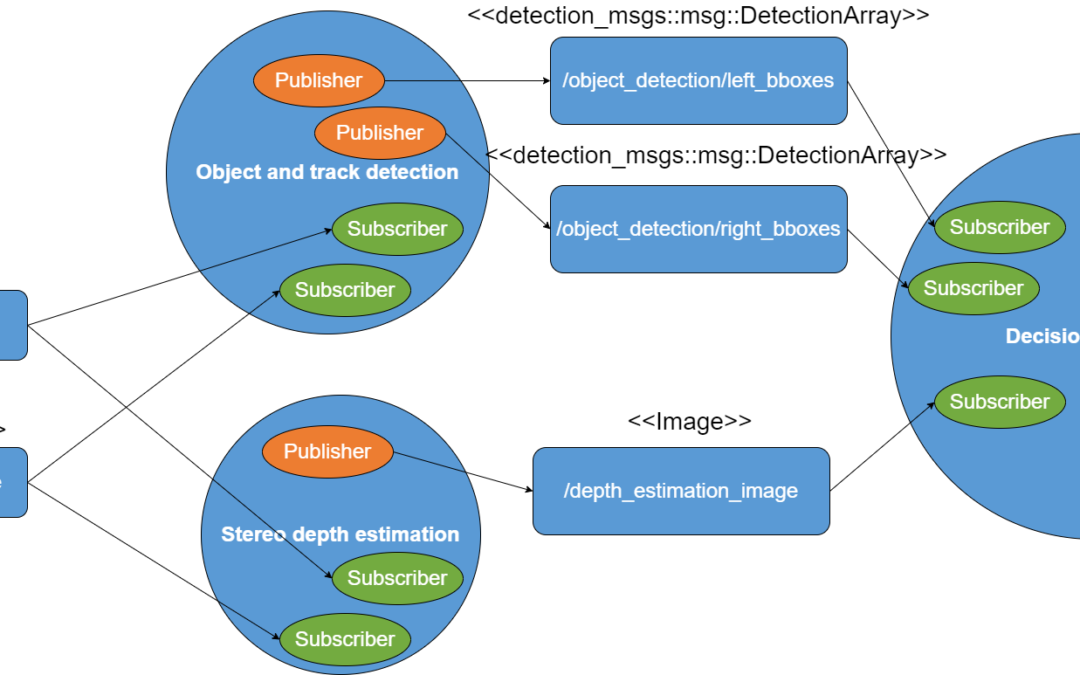
Integrating the Railway Case Study into the Reference Safety Architecture Pattern
Within the SAFEXPLAIN (SE) project, project partner, Ikerlan, leads the railway case study (CS), which is specifically centred on Automatic Train Operation (ATO). This article highlights how this CS is integrated into the reference safety architecture, building on the...

BSC’s Francisco J. Cazorla Delivers Keynote at prestigious 36th ECRTS Conference
BSC Research on real-time embedded systems takes center stage at premier European conference Francisco J. Cazorla from BSC delivers keynote at the 36th ECRTS The 36th Euromicro Conference on Real-Time Systems is a major international conference showcasing the latest...
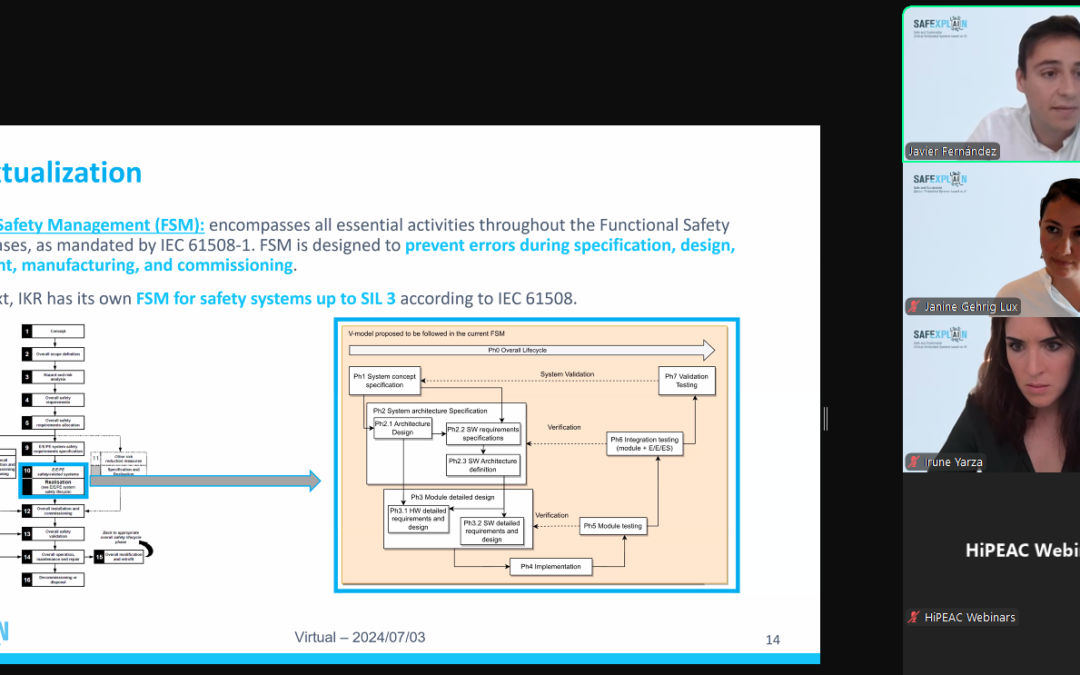
IKERLAN Webinar Provides Key Insights into AI-Functional Safety Management
Javier Fernández from IKERLAN contextualizes the current state of AI and Functional Safety Management On 4 July 2024, speakers from IKERLAN shared an in-depth look into the SAFEXPLAIN project developments in AI-Functional Safety Management (FSM) methodology. Irune...

SAFEXPLAIN joins EU AI Community with Digital Booth @ ADR Exhibition
The 2024 European Convergence Summit, hosted by the AI, Data and Robotics Association ecosystem, was held online on 19 June 2024 and brought together influential players from AI, Data and Robotics to discuss the impact of these technologies on society. The summit...

SAFEXPLAIN invited talk, workshop and panel participations at 28th Ada-Europe conference
Coordinator Jaume Abella introduces Irune Yarza as part of SAFEAI workshop co-located within 28th Ada-Europe conference The 28th Ada-Europe International Conference on Reliable Software Technologies (AEiC 2024) was held in Barcelona, Spain from 11-14 June 2024. This...